

Table of Contents
この記事で学習できること
- GPS受信機のからの信号はNMEA信号と呼ばれています。この規格を学習します。GPS受信機からの信号をPCで受けとり位置精度を計算します。またArduino UNO R3をシリアル・USB信号変換器として実際に使用する方法を学習します。
GPS受信機からのNMEA信号とは?
- NMEA信号は、GPSなどの測位機器が位置情報を外部へ伝えるための標準フォーマットです。 正式には NMEA 0183 と呼ばれ、アメリカの海洋電子機器協会(National Marine Electronics Association)が定めた通信規格です。
- 今回購入したGPS受信機からはNMEA信号が常時送信されてます。NMEA信号についてはインターネットで「NMEA」を検索すれば信号フォーマットの情報が多く見つかります。
- GPS受信機からは下記のようなNMEA信号が出力されています。
$GPGLL,3445.7563,N,13537.1216,E,054955.000,A,D*52
$GPGSA,A,3,17,09,06,02,11,194,12,19,04,195,03,20,1.09,0.80,0.74*05
$GPGSV,4,1,14,195,87,127,38,19,84,173,37,17,60,151,36,06,59,339,32*43
$GPGSV,4,2,14,09,49,102,46,50,48,194,31,04,32,062,27,11,28,296,35*7D
$GPGSV,4,3,14,20,25,248,26,02,24,300,29,12,18,302,35,194,18,189,33*40
$GPGSV,4,4,14,03,11,048,17,14,03,186,23*7D
$GPRMC,054955.000,A,3445.7563,N,13537.1216,E,0.00,213.19,190622,,,D*63
$GPVTG,213.19,T,,M,0.00,N,0.01,K,D*31
$GPZDA,054955.000,19,06,2022,,*52
$GPGGA,054956.000,3445.7563,N,13537.1216,E,2,12,0.80,19.8,M,34.5,M,,*5B- NMEA信号は「$」から始まり5文字の識別子の後にコンマ区切りで信号が続き、’CR,LF’がメッセージの終了になります。
- $GPGLLのセンテンスを例として説明します。緯度・経度、時刻などのデータが出力されていることが解ります。
$GPGLL,3445.7563,N,13537.1216,E,054955.000,A,D*52<CR><LF>
| $ | センテンスの開始 |
|---|---|
| GPGLL | アドレスフィールド( 5 文字) GP (Talker ID) GPはGPS受信機 GLL (sentence) GLLはGeographic Position, Latitude and Longitude |
| 3445.7563 | 緯度 : 度分.少数位 |
| N | 北緯 :( N )または南緯( S ) |
| 13537.1216 | 経度 : 度分.少数位 |
| E | 東経( E )または西経( W ) |
| 054955.000 | 時刻( UTC ) 時 分 秒.少数位 |
| A | ステータス [ A :有効,V :無効] |
| D | モード [A : GPS 単独測位, D : DGPS, N :無効] |
| *52 | チェックサム( $ から * の間) |
| <CR><LF> | センテンスの終了 |
必要な部品は?
- 秋月電子通商で購入したGPS受信機[GPS受信機キット]をArduino経由でPCと接続します。
| GPS受信機 | 1個 |
| Arduino UNO R3 | 1個 |
| 10KΩ抵抗 | 1個 |
| ダイオード | 1個 |
部品の購入先
Arduinoの電子工作をはじめようと思ったらスターターキットを購入するのが便利です。GPS受信機を別途購入すれば、この記事に必要な他の部品はArduino UNO R3を含めて全て付属しています。
(広告) Arduino スターターキットと電子部品の購入先
| 購入先 | 製品 | 備考 |
| Amazon | Arduino用のUNO R3 最終版スタータキット | Arduino UNO R3を含み、ブレッドボード、IC、センサなどが含まれています |
| 秋月電子通商 | 各種電子部品 | 各種電子部品を少量から注文できます |
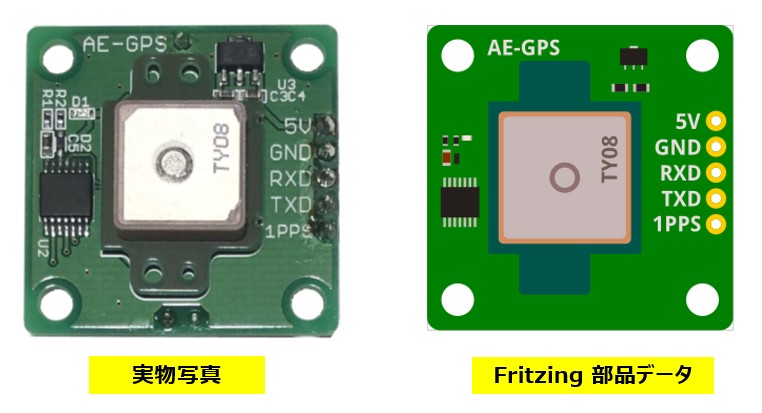
GPS受信機のfritizingデータを作成しました
- GPS受信機のfritzingの部品データを検索しましたが見つからなかったので自作しました。
- 秋月電子通商の製品のサイトの寸法データに合わせて外形図を作りました。外観は凝るときりがないので、ほどほどに似ている感じにしています。
(参考) fritzingの部品データを作成する詳しい記事は?
- [Fritzing の部品データを作成する方法]に詳細の手順をまとめています。
GPS受信機とArduinoの接続方法は?
- 秋月電子通商のGPS受信機[GPS受信機キット]に仕様書へのリンクがあります。GPS受信機の概要が説明されています。Arduinoに取り付ける場合はGPS受信機のRXは3.3V仕様なので、Arduinoからの5Vの電圧をダイオードと抵抗で3.3Vの電圧に変える回路図になっています。
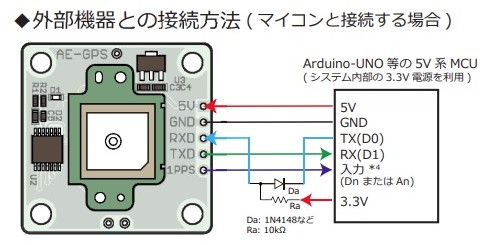
- Arduino UNO R3のデジタル出力のPin#0とPin#1をTX、RXとして使ってArduino UNO R3のボードをUSBシリアル変換器として使います。
(参考) Arduino UNO R3をUSBシリアル変換器として使う記事は?
- [Hardware Serialを利用してArduinoをUSBシリアル変換器として使いました]でArduino UNO R3ボードをUSBシリアル変換器として使用する方法を説明しています。
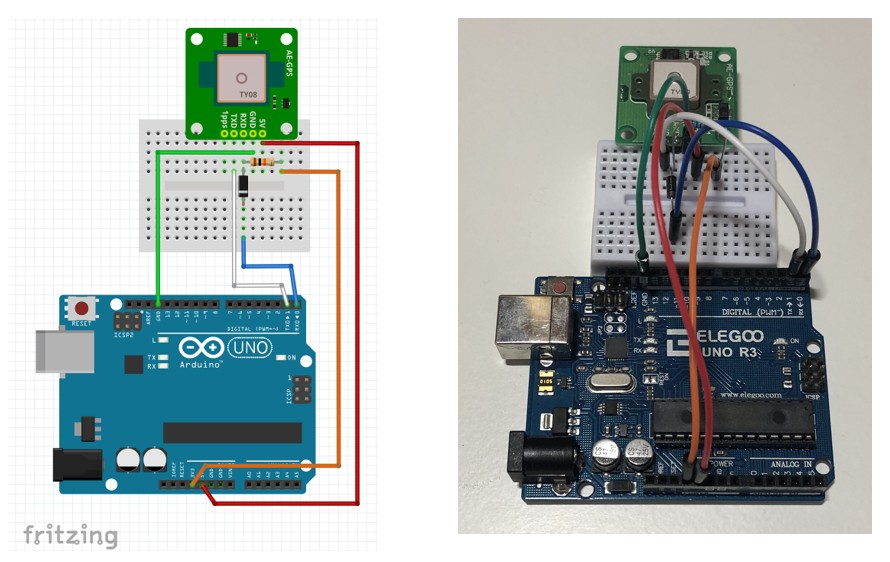
GPS受信機からの信号を受信する
- GPS受信機からの信号をArduino経由でPCで受信して専用ソフトで表示します。また一般的な通信ソフトTeratermでログを取り緯度経度の測定精度を計算します。
- Arduino UNO R3に空のSketchを書き込みます。
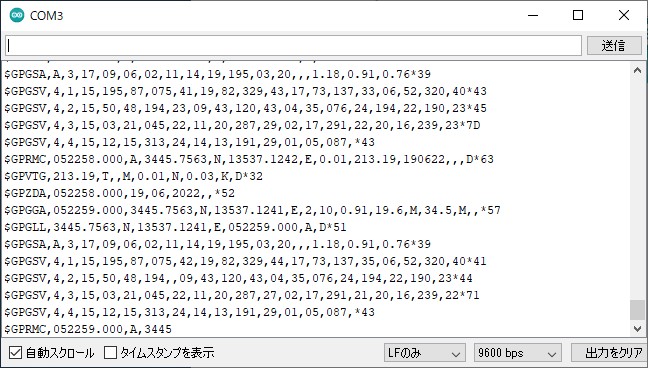
- シリアルモニタを立ち上げてGPS受信機からの信号が受信できていることを確認します。GPS受信機のボーレートの初期値は9600です。シリアルモニタの通信速度が9600であることを確認します。
// empty sketch
void setup()
{
}
void loop()
{
}- Arduino IDEのシリアルモニタにGPS信号が表示されました。GPS信号はNMEAの規格に従っています。
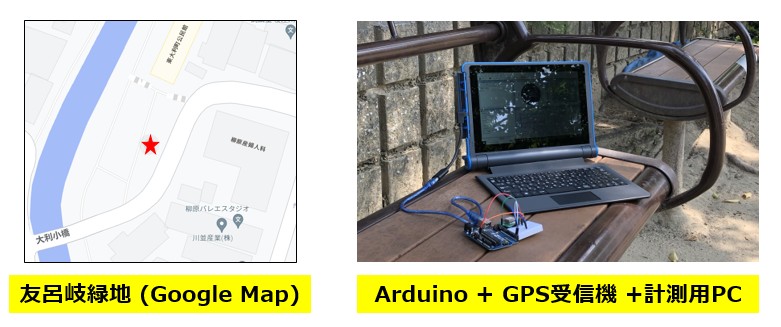
- 集合住宅の私の部屋はGPS受信が時々切れるので、寝屋川市の友呂岐緑地でGPS受信機の信号計測をしました。
GPS受信機の測位精度は?
- 屋外(友呂岐緑地)で測定したデータを使って、GPS受信機の緯度経度の測位結果とGoogle Mapから得た緯度経度との差を計算してみます
- Google Mapで選んだ地点の、緯度経度は、34.762638N, 135.618690E でした。
- GPS受信機からのNMEA信号を、通信ソフトTeratermで受信してログを取ります。信号は「,」区切りなのでCSVファイルとしてEXCELで読み込み緯度・経度のデータを計算しました。取得したデータ数は1352個(データは1秒に1回で22分程度のデータ)です。
| NMEA データ | 緯度 | 経度 |
| 平均 | 3445.756196 | 13537.12101 |
| 標準偏差 | 0.000103757 | 0.000329374 |
| 最大値 | 3445.756300 | 13537.121700 |
| 最小値 | 3445.75600 | 13537.120500 |
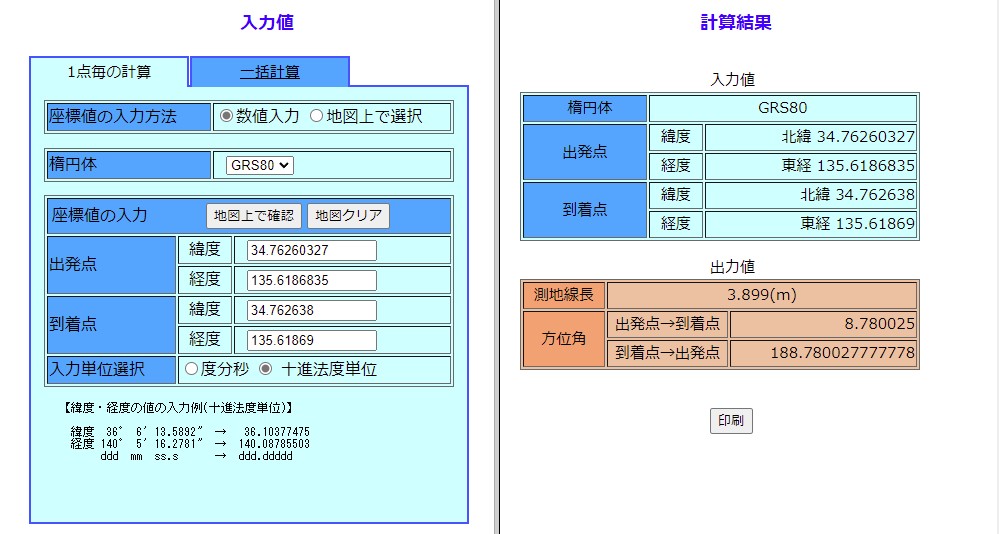
- 2点間の距離と方位角の計算が国土地理院[測量計算(距離と方位角の計算) ]で公開されているので使用させていただきました。測地系のGRS80とWGS84はほとんど同じとのことです。
- NMEAの出力は十進法度単位に変換して入力します。
- 出発点をGPS受信機の平均値、到着点をGoogle Mapから得た緯度経度としています。直線で3.899mの誤差です。(Google Mapで選んだ地点は目視で選んでいるので、その誤差も含みます。)
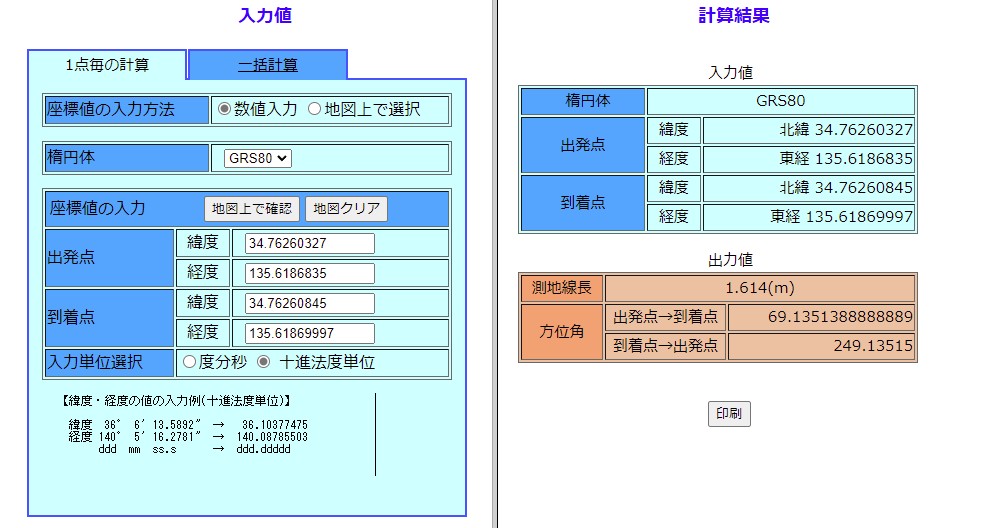
- 測定バラツキを、標準偏差の3倍を使って計算します。出発点をGPS受信機の平均値、到着点をGPS受信機の平均値に標準偏差の3倍を加えた数値で計算しました。
- 繰り返し誤差は今回の測定では3σで1.614mです。半径1.614mの円にほとんどの測定値が収まることになります。最初は自分の部屋で測っていたので結構バラツクなと思っていたのですが屋外で計測すると多くの衛星信号を強いレベルで補足することができるので小さな範囲に収まるなと感じました。
[Power GPS Express]でGPS受信機からの信号を表示する方法は?
- Power GPS ExpressはGPS受信機の信号を受信し測位情報を表示したりGPS衛星の位置を表示したり、GPS受信機を操作したりできます。
- 秋月電子通商のGPS受信機[GPS受信機キット]のサイトからソフトウェアパッケージをダウンロードして使えます。
- GPS受信機とPCをArduinol経由で接続して、Power GPS Expressを立ち上げ、COMポート、ボーレートを設定して接続します。
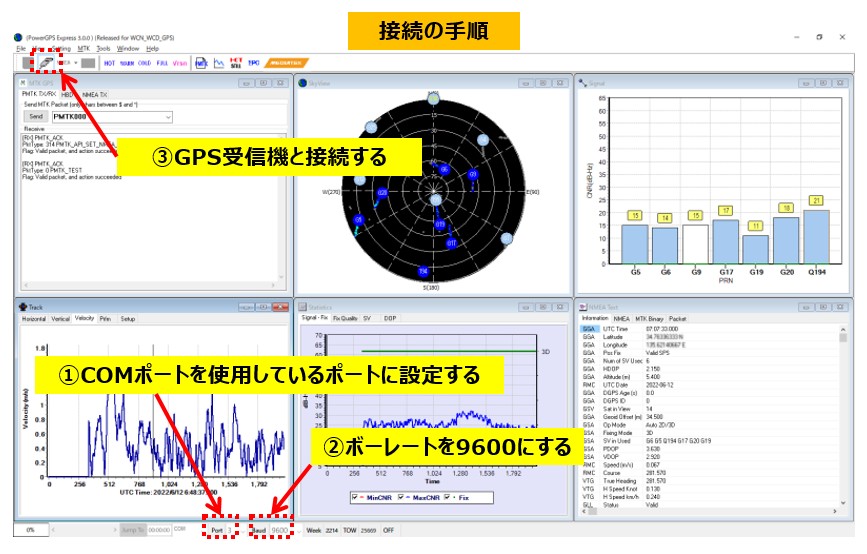
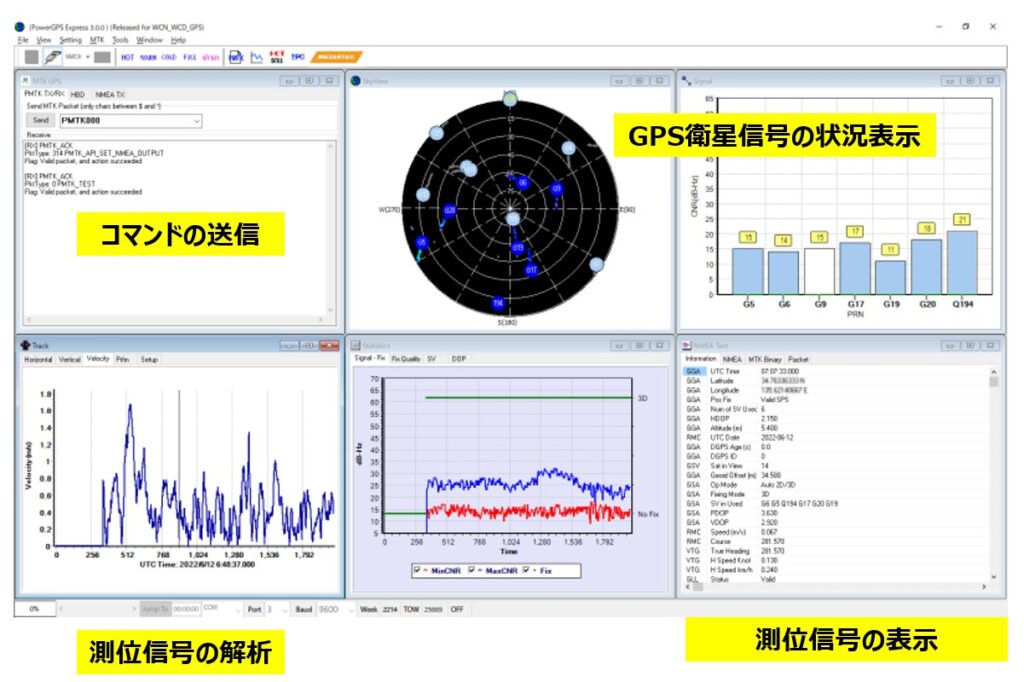
- Power GPS ExpressはGPS受信器からの信号をさまざまな方法で処理し、表示します。
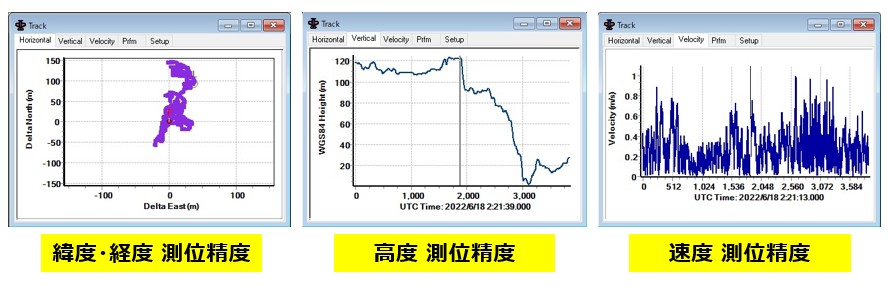
- 測位信号の解析のダイアログで、緯度・経度、高度、速度の測位精度がグラフ化して表示されます。
- 私の部屋で取得したGPSの測位情報を使うと、測定位置(緯度・経度)は南北方向で200m、東西方向で100m程度の範囲で分布しています。
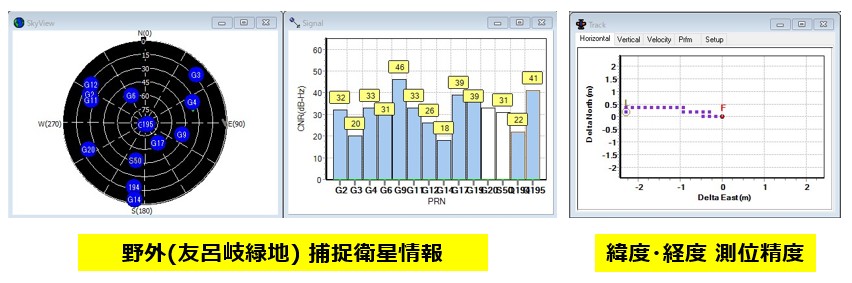
- 屋外(友呂岐緑地)で測定すると、捕捉している衛星の数が増えるためか、緯度経度の測定結果の分布はかなり小さな範囲に収まっています。
GPS受信機の設定方法は?
- 秋月電子通商のGPS受信機のリンクにGPS受信機を操作するコマンドの仕様があります。GPS受信機のコマンドフォーマットは18ページの[NMEA Packet Format]に記述されています。
- 秋月電子通商のサイトのGPS受信機のコマンドの仕様書で、GPS受信機へのコマンドフォーマットは[NMEA Packet Format]に記述されています。
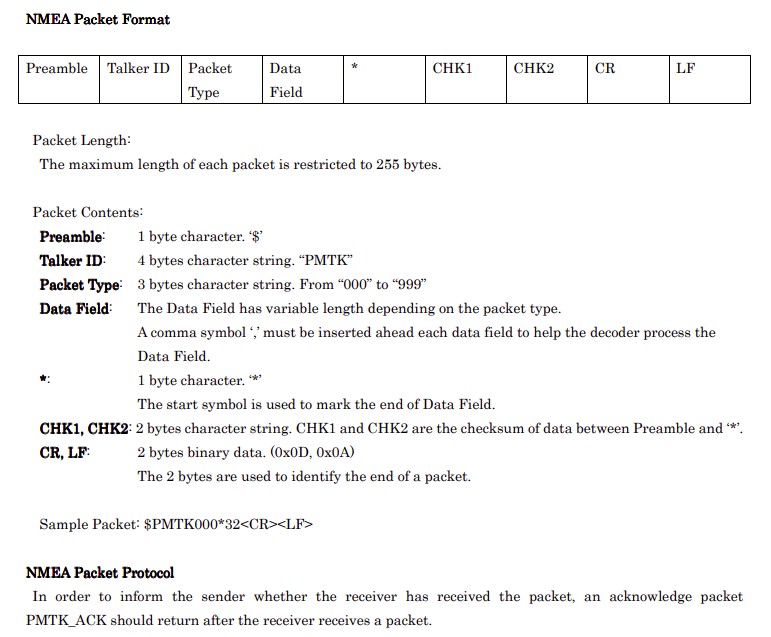
- 書式は、「[$]+[PMTK]+[3桁の番号]+[データ(コマンドによって異なる)]+[*]+[チェックサム]+[CR,LF]」です。
- チェックサムの計算は専用サイト[NMEA MTK checksum calculator]があり計算結果を出してくれます。
- 出力信号の選択は24~25ページの[314 PMTK_API_SET_NMEA_OUTPUT]に記述されています。
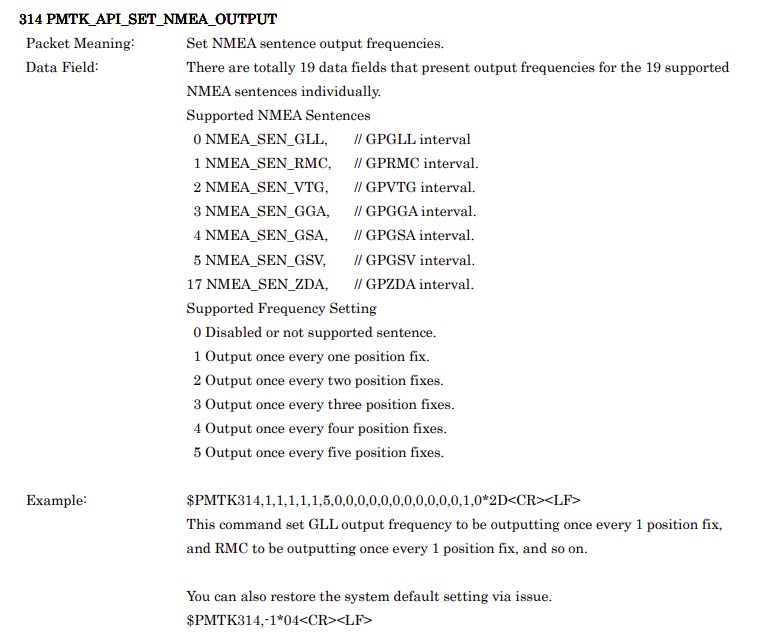
- PMTK314コマンドでGPS受信機からどの信号をどのようなインターバルで出力するかを設定できます。
- 例えば、GPGLLのみを5秒間隔で出力するためには、最初のビットを’5’残りを’0’と設定します。
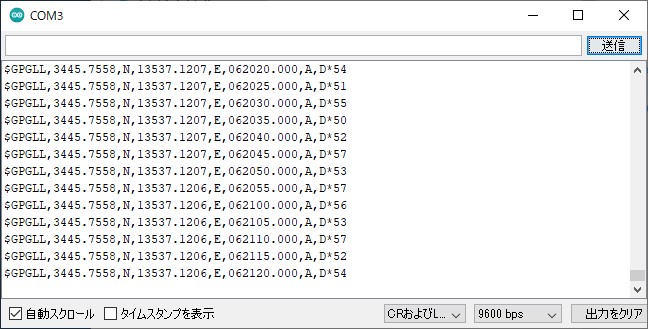
$PMTK314,5,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*2D- Arduino IDEのシリアルモニタにはPC側からの送信ができるので、このコマンドを送信するとGPGLLのみが5秒間隔で送信されているのが解ります。
- 送信するコマンドは最後がCR,LFです。シリアルモニタ下部の設定を「CRおよびLF」にしてください。
- GPS受信機からの出力設定を初期値に戻すには以下のコマンドを発行します。
$PMTK314,-1*04- GPS受信機のボーレートなども変更可能です。どのような機能を変更できるかは、GPS受信機のコマンド仕様書で確認下さい。
まとめ
- GPS受信機からのNMEA信号の仕様、実際にPCで受信する方法、受信したデータの計算方法などを学習できました。
- この記事の続きで、GPS信号をSDカードに保存する方法と移動しながらGPS信号をSDカードに長時間保存し、地図に表示させる方法も学習しました。
(参考) GPS信号の受信データをSDメモリに保存する記事は
- [ArduinoでGPS測位データをSDカードに保存する方法]で測定したGPS受信データをSDメモリに保存する方法をまとめました。
(参考) 移動しながらGPS信号を受信しデータを地図に表示させる記事
- [GPS受信機の測位データを地図に表示する方法] — GPS受信機を持って徒歩と電車で移動して、GPSの軌跡と精度を調べました。
ご質問、誤植の指摘などありましたら。「問い合わせ 」のページからお願いします。

