
Table of Contents
この記事で扱う内容
筐体設計では、倒立振子・自己バランスロボット(以下は自己バランスロボットと表記します)の筐体設計と組み立て を解説します。
- 筐体設計の基本方針
- 部品配置の考え方
- SketchUpとFreeCAD を使った筐体モデリング
- 3Dによる造形と組立て
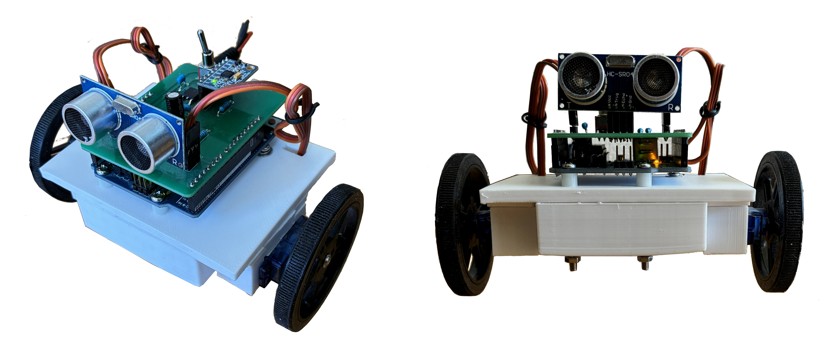
自己バランスロボットの完成映像
- 自立している動画です。(再生時間 約30秒)
● この自己バランスロボットは色々な自作部品も使っていますので自作にはややハードルが高めです。市販の部品を使う単純な構成の倒立振子ロボットの作成を記事[ Arduinoで実現する最小ユニット倒立振子ロボット]にまとめました。このロボットの完成動画(再生時間25秒程度)です。
筐体設計の基本方針
自己バランスロボットは、重心位置が安定性に大きく影響します。
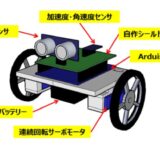
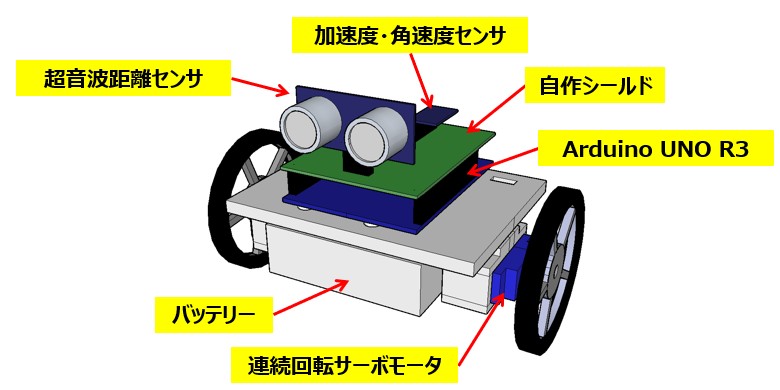
● 設計のポイント
- MPU6050 はロボットの中心に近い位置へ
- HC-SR04(超音波距離センサ)は前面に配置 → 障害物検知のため、視界を遮らない位置が必須
- バッテリーは下部に配置し、重心を低くする
- サーボモーターは左右対称に配置
- 配線スペースを確保
- Arduino はメンテナンスしやすい位置に配置
SketchUpを使った筐体モデリング
- 3DCADのSketchUpを使って自己バランスロボットの外形の構想をまとめます。SketchUpは寸法を入力してもしなくても形作りができます。素早く描けるのでドラフトの段階では使い勝手が良いと感じています。
FreeCAD を使った筐体モデリング
- 筐体部を3Dプリンタで作成するには正確な寸法で入力が必要です。また修正がある場合に簡単な操作で修正できる機能があれば便利です。FREECADはパラメトリック設計ができます。例えば、ある寸法を変えれば関連する寸法も変わり、微調整がとても楽です。
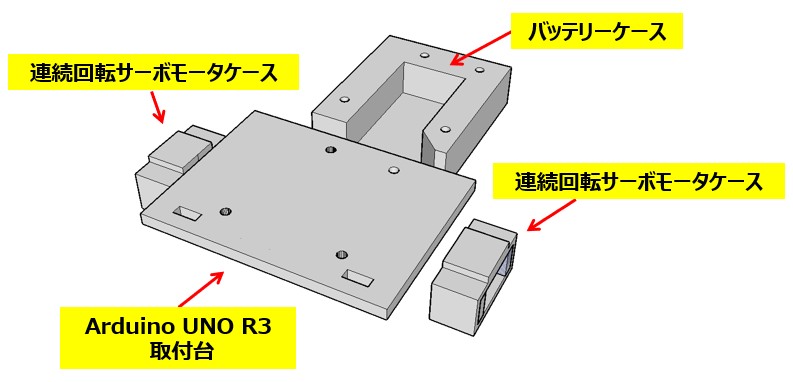
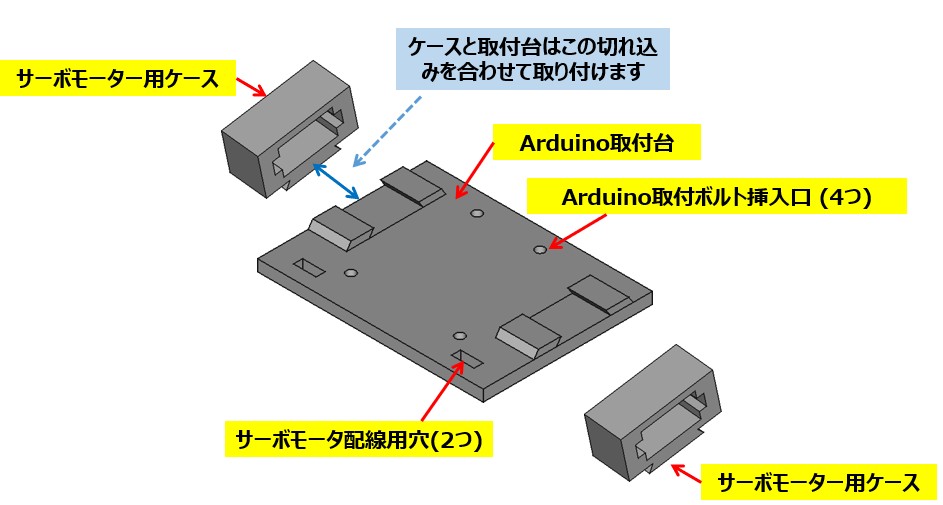
- 筐体は3Dプリンタの1回の造形では作れません。筐体をArduino UNO R3 取付台、連続回転サーボモータケース(2個)、バッテリーケースの3つの部品に分けて作ります。
● サーボモータケースとArduino取付台の構成
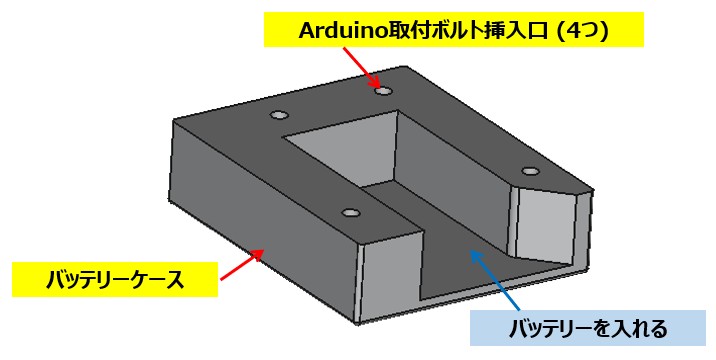
● バッテリーケースの構成
自己バランスロボットの筐体作成と電気部品の組立て
- 筐体の材料はPETGを使いました。比較的強度が高く、耐久性が必要なロボットに向いています。一番大きなArduino取付台で4時間ほどで造形します。
- 完成した筐体の部品と電気部品を組み立てます。サーボモータはケースに差し込み、Arduinoi UNOとバッテリーケースはビスで共締めします。バッテリーは差し込むのみです。
- すべての部品を取り付けた状態で、重心位置が車輪軸の中心にあるかを確認ます。ずれている場合は、再度Arduino取付台を3Dプリンタで作成し、重心位置微調整します。FREECADはパラメトリック設計ができるので、微調整の設計変更が簡単にできます。
プログラミングの記事への展開
自己バランスロボットの作成プロジェクトは分量が多いので以下のように分けて記事にしています。
御質問、誤植の指摘、記事の改善点の気づきなどありましたら「問い合わせ 」のページからお願いします。